Research Projects
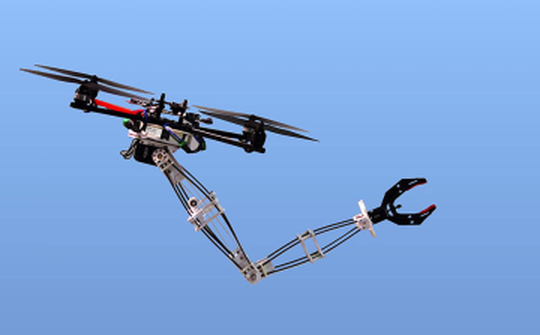
Accurate Aerial Manipulation under Uncertainties
This project performs mechatronics design and developes novel algorithms to increase the accuracy of aerial robotic manipulators under dynamical uncertainties.
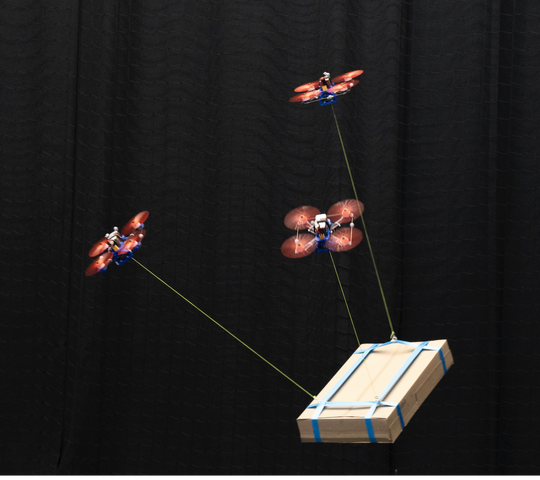
Cooperative Aerial Manipulations of Cable-Suepended Loads
This project develops algorithms to lift and control the orientation of a cable-suspended load using multiple aerial robots.
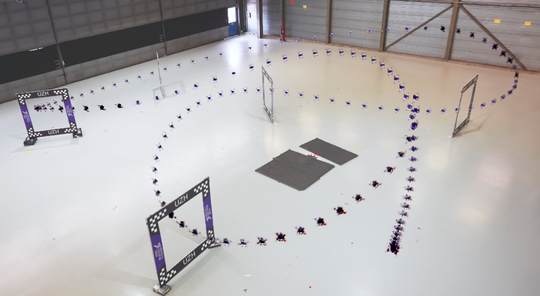
Agile Flight Control for Drones
This project aims at designing flight controllers to achieve agile flight for drones, with the aim of improving its performance in time-critical missions.
Quadrotor Fault Tolerant Flight Control
This project leads to a set of fault-tolerant control algorithms for a quadrotor with motor failures in realistic scenarios, such as withstanding strong winds up to 10m/s, and recovery from extreme conditions.

Aerodynamic Modeling Identification for Multi-Rotor Drones
This project aims at obtaining a set of aerodynamic model for drones using system identification and machine learning technique.

High Efficiency Air Cargo Design
A student project with the aim of desining an unmanned air-cargo with high aerodynamic and structral efficiency.
