Sihao Sun
Researcher in Robotics
Delft University of Technology
Biography
I am a scientist focusing on the planning, estimation, and control of aerial robotic systems. My research has been published in top-tier journals such as Science Robotics, Nature, and IEEE Transactions on Robotics. I am also the recipient of a Best Paper Award of IEEE Robotics and Automation Letters (RA-L), and serve as an Associate Editor for RA-L since 2023.
I am currently the Principal Investigator of the VENI project “Accurate Aerial Manipulation”, funded by the Dutch Research Council (NWO) Talent Program, and embedded in the Autonomous Multi-robots Lab (AMR), Department of Cognitive Robotics (CoR) at Delft University of Technology.
I earned my PhD in Aerospace Engineering at TU Delft in 2020 under the supervision of Dr. Coen de Visser and Prof. Guido de Croon, with a doctoral doctoral thesis addressing fault-tolerant control problems for aerial robots. From November 2020 to December 2021, I worked as a postdoctoral researcher in the Robotics and Perception Group (RPG) at the University of Zurich under the guidance of Prof. Davide Scaramuzza. From August 2022 to November 2023, I held another postdoctoral position in the Robotics and Mechatronics (RaM) group at the University of Twente, collaborating with Prof. Antonio Franchi.
Interests
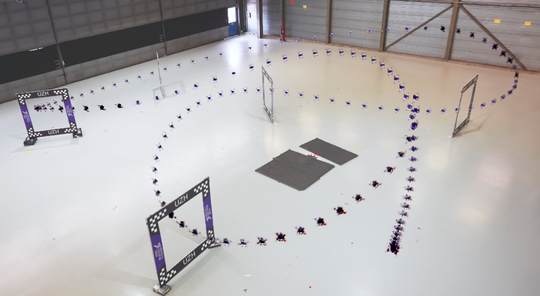
- Aerial Robotics
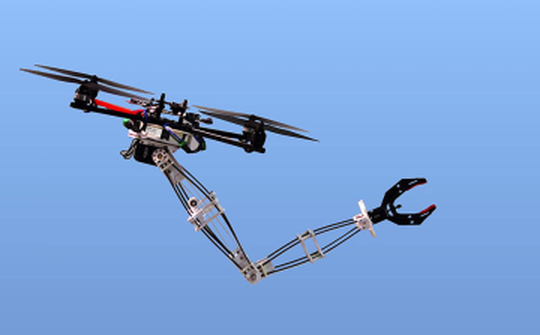
- Aerial Manipulations
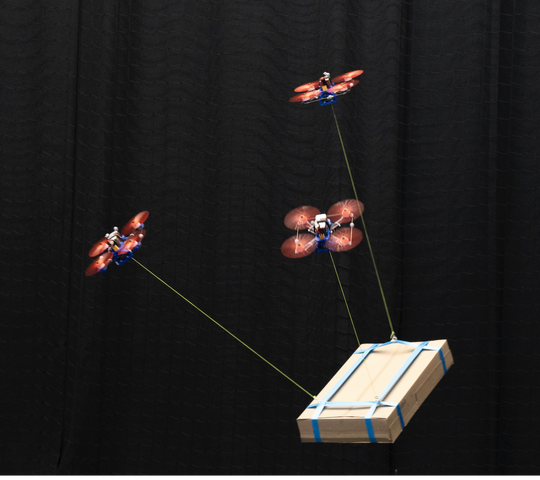
- Multi-robot Systems
- Robotics Perception
- Incremental Nonlinear Control
Experience
-
Postdoc researcher, 2022-2023
Univeristy of Twente, with Prof. Antonio Franchi
-
Postdoc researcher, 2020-2021
University of Zurich, with Prof. Davide Scaramuzza
-
PhD in Aerospace Engineering, 2016-2020
TU Delft, with dr. Coen de Visser