Agile Flight Control for Drones
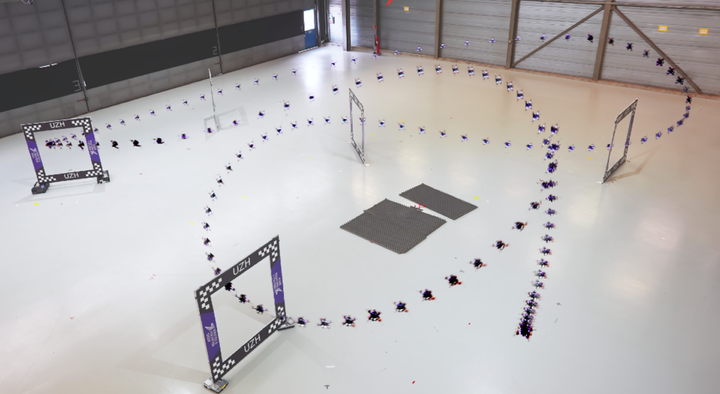 A quadrotor drone flying through multiple gates in a time-optimal manner.
A quadrotor drone flying through multiple gates in a time-optimal manner.
Many drones, such as quadrotors, are highly agile compared with other robotic/aerospace systems. However, their agility is not fully exploited, owning to the immaturity of flight algorithms. This project aims at further excavating the potential of drones to achieve their maximum agility, which is highly beneficial for time-critical missions such as search and rescue.
So far, we have made a thorough comparative study of the two most promising control approaches for agile drone flights: the differential-flatness-based controller (sometimes it’s referred to as the geometric control), and the nonlinear model predictive control. This study shows that both methods have the ability to track agile trajectories with 20m/s top speed and 5g acceleration. But the nonlinear model predictive control shows better performance when tracking many dynamically infeasible trajectories.
We also propose a nonlinear model predictive contouring controller (MPCC) for agile drone flights. Unlike the above two state-of-the-art methods, this control approach does not need an off-line generated time-optimal trajectory encoding full states of a quadrotor. Instead, it can follow arbitrary 3D paths in a near-time-optimal manner. These 3D paths can be splines, or time-optimal trajectories computed using a reduced model, which can be effectively generated online to be adaptive against environmental uncertainties. Thanks to this property, our method achieves a decent trade-off between robustness and performance during agile flights in cluttered environments. (Check our video)
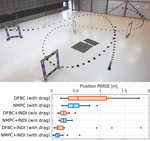
Model uncertainties, especially from complex aerodynamic effects, are another major threat to flying safety and degrade the performance in agile flights. For this, we proposed a nonlinear model predictive control framework combining the L1 adaptive control (L1-NMPC). Extensive flight experiments demonstrate that the proposed method has high robustness against different types of model uncertainties, including mismatch in the inertial properties, slosh payload (like a beer!), and complex aerodynamic effects. (Check our video
Sihao Sun
Researcher in Robotics
Publications
A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight
Model Predictive Contouring Control for Near-Time-Optimal Quadrotor Flight

Performance, Precision, and Payloads: Adaptive Nonlinear MPC for Quadrotors
