 A Quadcopter flying through gates using the MPCC method
A Quadcopter flying through gates using the MPCC method
Abstract
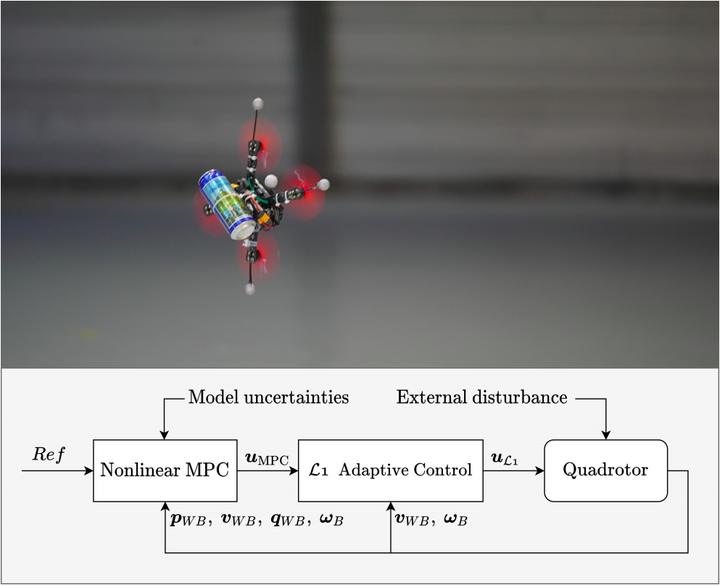
Agile quadrotor flight in challenging environments has the potential to revolutionize shipping, transportation, and search and rescue applications. Nonlinear model predictive control (NMPC) has recently shown promising results for agile quadrotor control, but relies on highly accurate models for maximum performance. Hence, model uncertainties in the form of unmodeled complex aerodynamic effects, varying payloads and parameter mismatch will degrade overall system performance. In this paper, we propose L1-NMPC, a novel hybrid adaptive NMPC to learn model uncertainties online and immediately compensate for them, drastically improving performance over the non-adaptive baseline with minimal computational overhead. Our proposed architecture generalizes to many different environments from which we evaluate wind, unknown payloads, and highly agile flight conditions. The proposed method demonstrates immense flexibility and robustness, with more than 90% tracking error reduction over non-adaptive NMPC under large unknown disturbances and without any gain tuning. In addition, the same controller with identical gains can accurately fly highly agile racing trajectories exhibiting top speeds of 70 km/h, offering tracking performance improvements of around 50% relative to the non-adaptive NMPC baseline. We will release our code fully open-sourced upon acceptance..