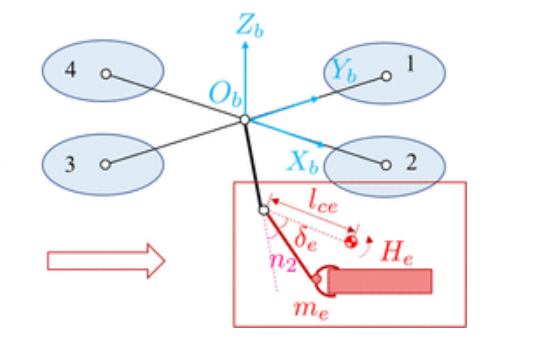
 Illustration of A quadrotor with a 2-DOF manipulator carrying an unknown payload.
Illustration of A quadrotor with a 2-DOF manipulator carrying an unknown payload.
Abstract
The interaction of aerial robots with the environment has evolved from passively perceiving to actively grasping external objects with a manipulator. However, the uncertainties caused by the unknown payload inevitably pose challenges to the precise control of the aerial manipulator. This paper focuses on analyzing the uncertainties associated with an aerial manipulator grasping an unknown payload and deriving a unified disturbance model through a linear transformation of the system dynamics. Utilizing this disturbance model allows for more precise compensation, enhancing trajectory tracking performance through meta-adaptive control. The motivation for this research lies in identifying uncertainty, distinguishing between known states and unknown parameters, and ultimately improving controller performance by estimating these uncertain parameters. In the real world, the ability to handle unknown disturbances is crucial in robotic manipulation, particularly for aerial platforms, where stability is more vulnerable compared to fixed-base manipulators.