Cooperative Aerial Manipulation with Cables
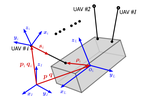
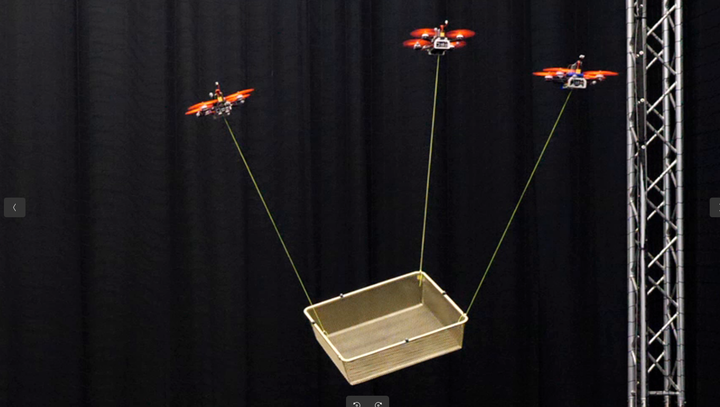 Three drones manipulating the full pose of an object
Three drones manipulating the full pose of an object
Aerial robots generally have limited payload capacity. In this project, we are developing algorithms for drones to collectively carry and manipulate a heavy load.
Sihao Sun
Researcher in Robotics
Publications
Nonlinear MPC for Full-Pose Manipulation of a Cable-Suspended Load using Multiple UAVs
MPC-based framework for multi-lifting systems.