Accurate Aerial Manipulation under Uncertainties
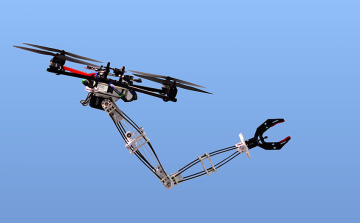 2-DoF Aerial manipulator (Source CNRS-LAAS)
2-DoF Aerial manipulator (Source CNRS-LAAS)
Unlike mobile robots on the ground, air manipulators are based on a flying platform that can easily suffer from external forces and torque disturbances from the environment, such as wind and unknown payloads. This project aims to improve the accuracy of air manipulators through both hardware design and algorithm improvements.
Sihao Sun
Researcher in Robotics
Publications
Global End-Effector Pose Control of an Underactuated Aerial Manipulator via Reinforcement Learning
An RL-INDI approach for controlling a lightweight yet varsatile aerial manipulator with a 2-DoF arm, achieving precise end-effector pose control in global SE(3) and robustness to disturbances in real-world flight experiments.

Proximal cooperative aerial manipulation with vertically stacked drones
We have addressed the long-standing challenge of controlling and exchanging tools between two multirotor UAVs operating in close vertical proximity.

Uncertainty Modeling Enabled Meta Adaptive Control for Aerial Manipulators
Meta Adaptive Control for Aerial Manipulators.
